|
Computer Vision Research Engineer (PhD) with a strong background in image processing and deep learning. My doctoral research focused on remote sensing and 3D vision tasks (reconstruction, calibration, co-registration, change detection). More recently, my work has centered on neural rendering for remote-sensing imagery, cultural heritage digitization, and the development and application of generative AI methods. Born in Barcelona (1995), I studied at Universitat Pompeu Fabra, completing with honors a BSc in Audiovisual Systems Engineering and a specialized MSc in Computer Vision. I moved to Paris in October 2018 to pursue a PhD at Centre Borelli (ENS Paris-Saclay) under the supervision of Gabriele Facciolo. I defended my thesis Applications of multi-image remote sensing in December 2022. In January 2024 I joined Eurecat where I currently contribute to Computer Vision and AI projects in Catalonia and Europe. |

|
|
I am passionate about scientific writing and communicating research through peer-reviewed publications. Selected publication highlights are listed below. |
|
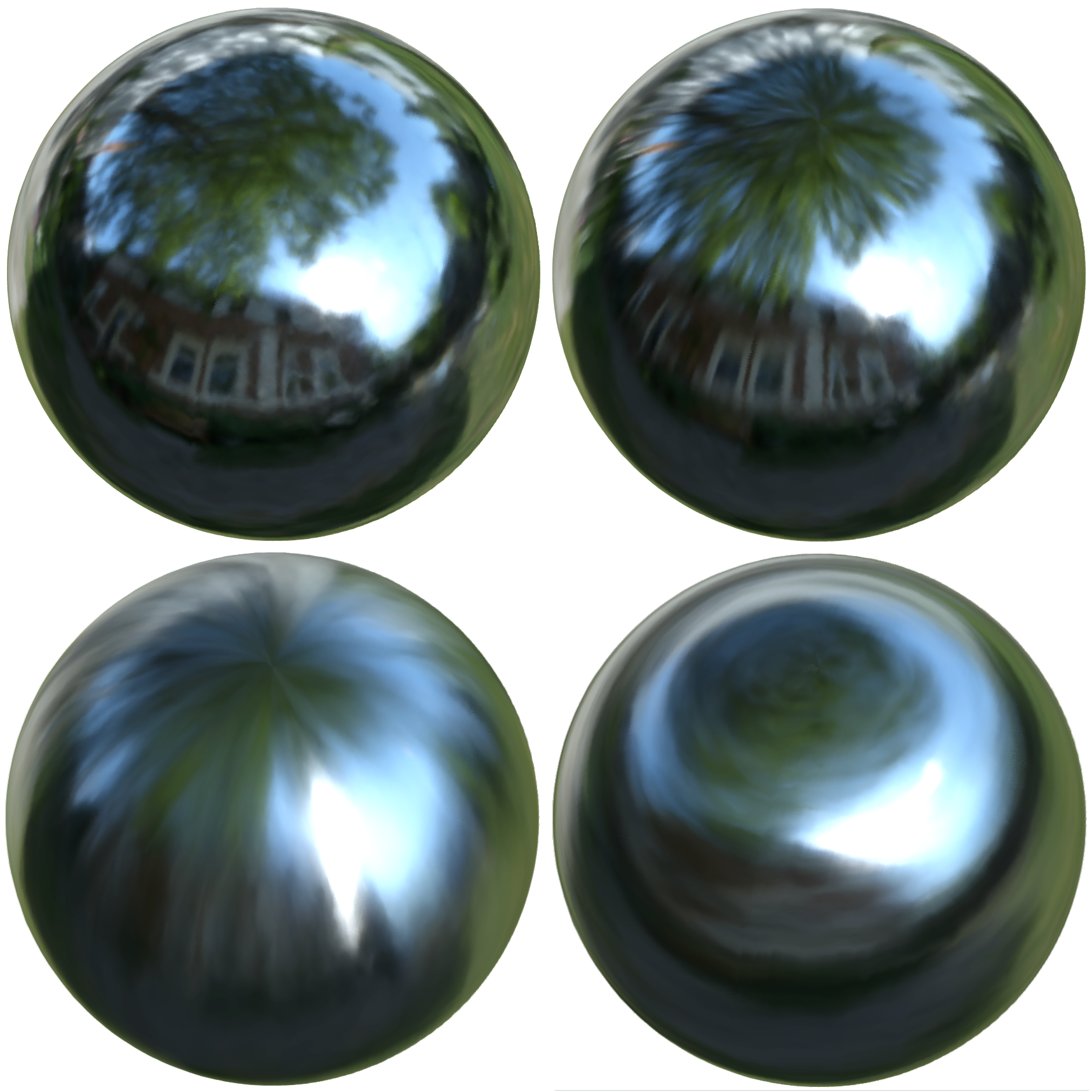
Albert Barreiro, Roger Marí, Rafael Redondo, Gloria Haro, Carles Bosch ISPRS Archives, 2026 project page / paper / code / doi: 10.5194/isprs-archives-XLVIII-2-W12-2026-33-2026 ShinyNeRF advances NeRF-based 3D digitization of specular surfaces by phisically modeling isotropic and anisotropic reflections based on interpretable material/geometric parameters (normals, tangents, ASG anisotropy), enabling anisotropic material editing. |
|
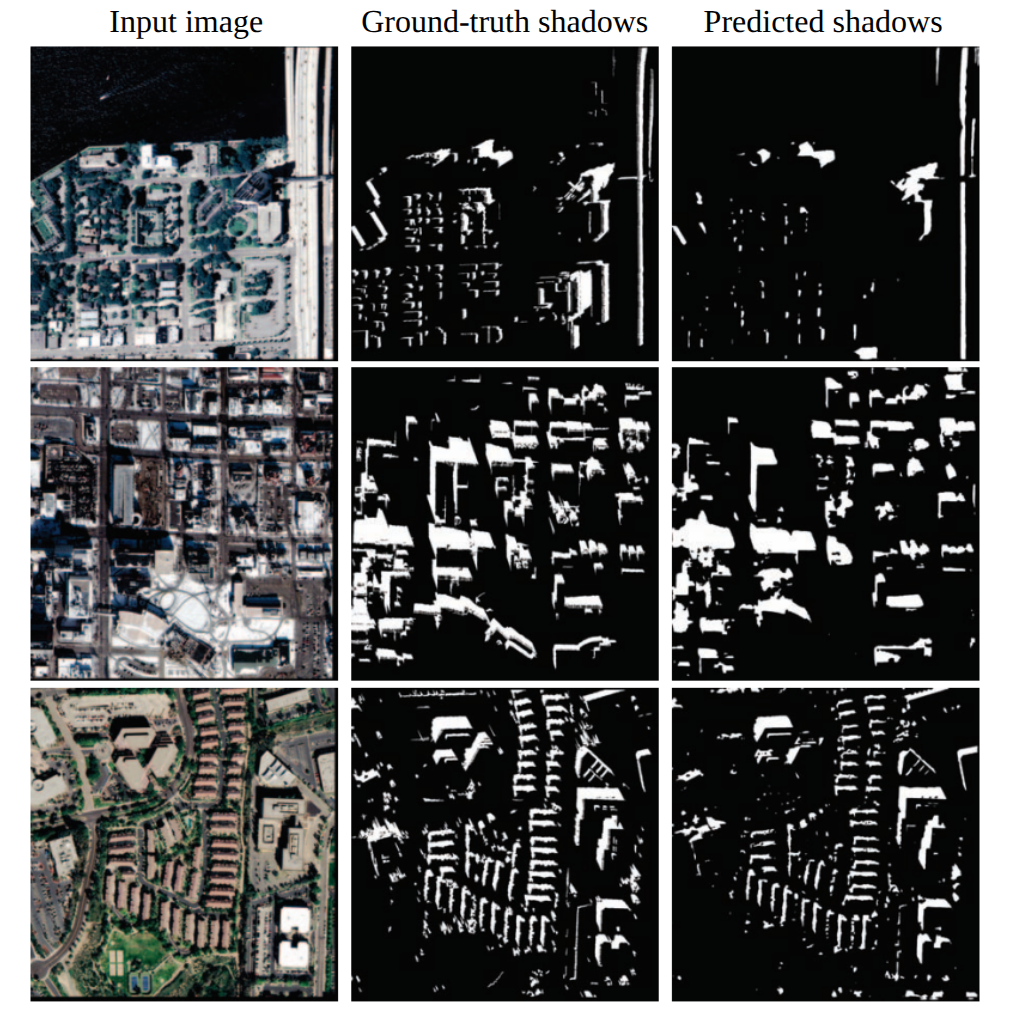
Elías Masquil, Roger Marí, Thibaud Ehret, Enric Meinhardt-Llopis, Pablo Musé, Gabriele Facciolo CVPR Workshops, 2025 project page / paper / data / doi: 10.1109/CVPRW67362.2025.00224 This new dataset comprises multi-view satellite images (PAN, RGB), corresponding vegetation and shadow masks, bundle-adjusted RPC camera models and ground-truth DSMs for 702 different geographic areas of 500x500 m each across three different US cities. |

|
Roger Marí, Rafael Redondo IPOL, 2025 paper / demo / code / doi: 10.5201/ipol.2025.580 We evaluate the fidelity and realism of different architectural variations of a latent diffusion model, which is used to generate RGB aerial images conditioned to semantic maps. |
|
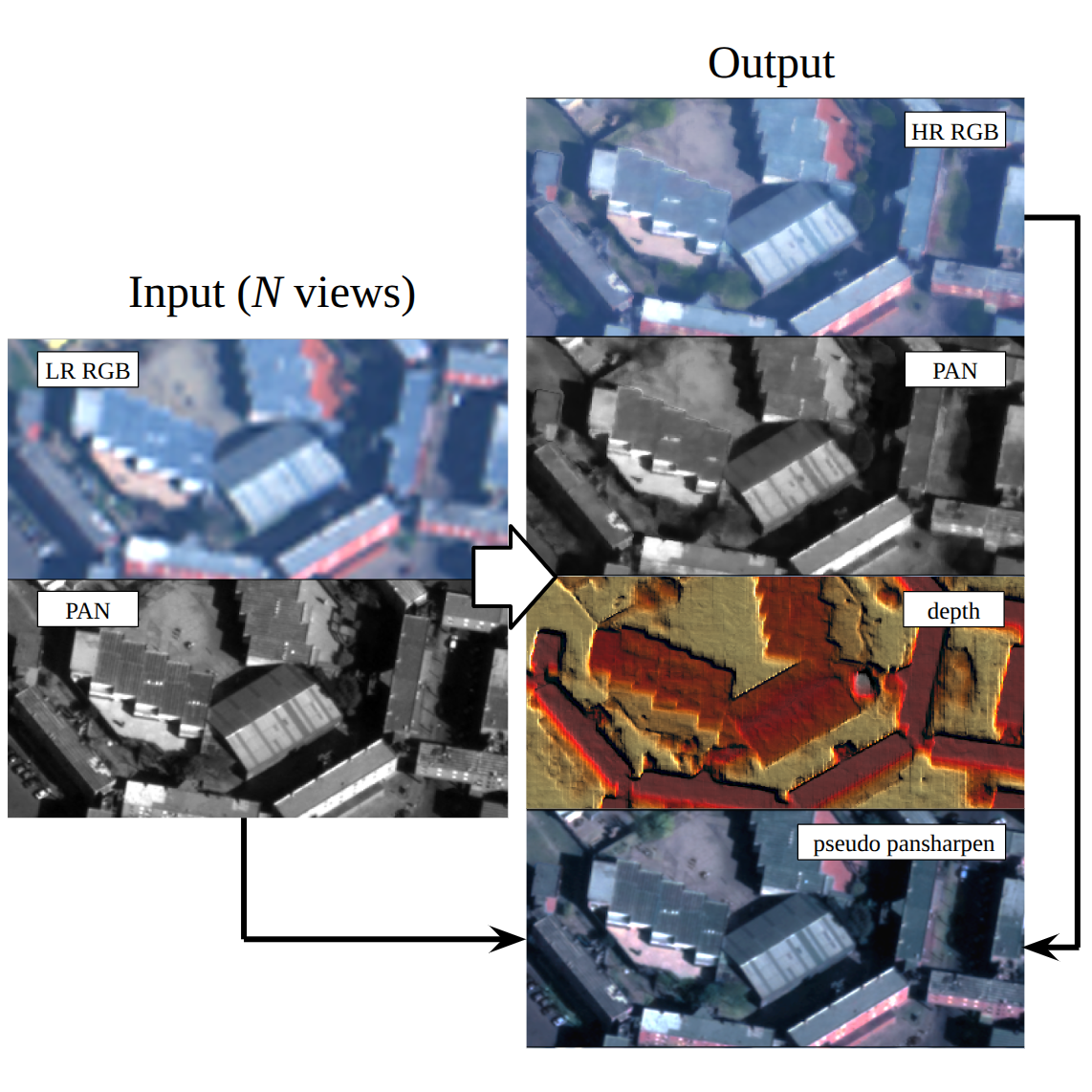
Emilie Pic, Thibaud Ehret, Gabriele Facciolo, Roger Marí IGARSS, 2024 paper / doi: 10.1109/IGARSS53475.2024.10641439 EO-NeRF is extended to handle high-res panchromatic (PAN) and low-res multispectral (MS) inputs, eliminating the need for separate pansharpening. The resulting model can render pansharpened image surrogates with high-res color information for each input viewpoint. |
|
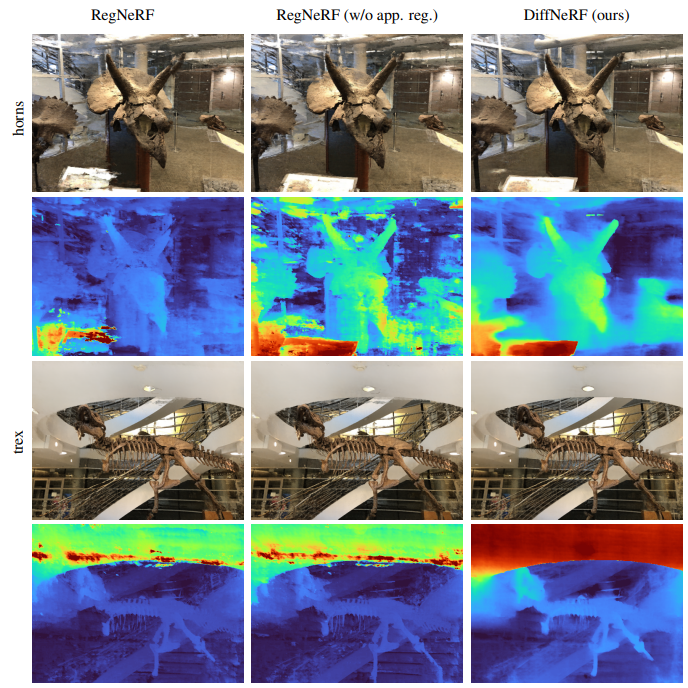
Thibaud Ehret, Roger Marí, Gabriele Facciolo WACV, 2024 paper / code / poster / doi: 10.1109/WACV57701.2024.00306 We propose a generic regularization framework for NeRF based on differential geometry that outperforms previous state-of-the-art methods with only three input views. We compare our approach with RegNeRF (CVPR 2022). |

|
Roger Marí, Gabriele Facciolo, Thibaud Ehret CVPR Workshops, 2023 project page / paper / code / poster / doi: 10.1109/CVPRW59228.2023.00197 We present EO-NeRF, that reveals scene geometry from multi-date satellite images with an unprecedented level of detail. We propose a geometrically consistent shadow model and a radiometric decomposition of the scene adapted to pansharpened satellite images. |
|
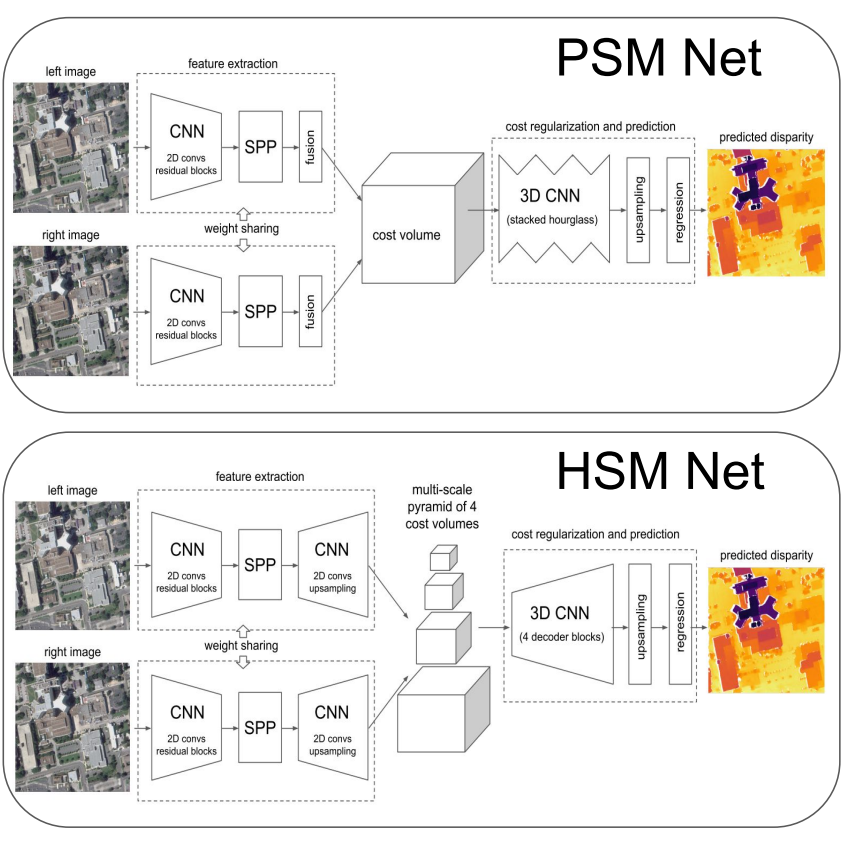
Roger Marí, Thibaud Ehret, Gabriele Facciolo IPOL, 2022 paper / demo / doi: 10.5201/ipol.2022.435 We evaluate the performance of the deep learning architectures PSM (CVPR 2018) and HSM (CVPR 2019) for disparity estimation on multiple pairs of high-resolution satellite images. |
|
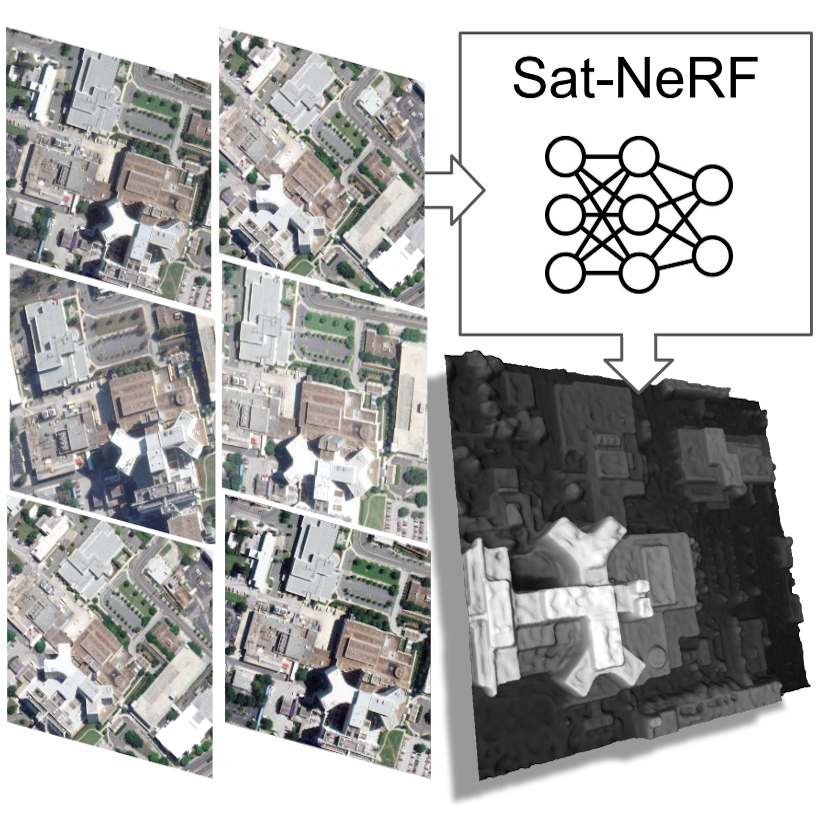
Roger Marí, Gabriele Facciolo, Thibaud Ehret CVPR Workshops, 2022 project page / paper / code / poster / doi: 10.1109/CVPRW56347.2022.00137 Sat-NeRF is the first work in neural rendering for multi-date satellite images to demonstrate quantitatively convincing results in terms of surface reconstruction. |
|
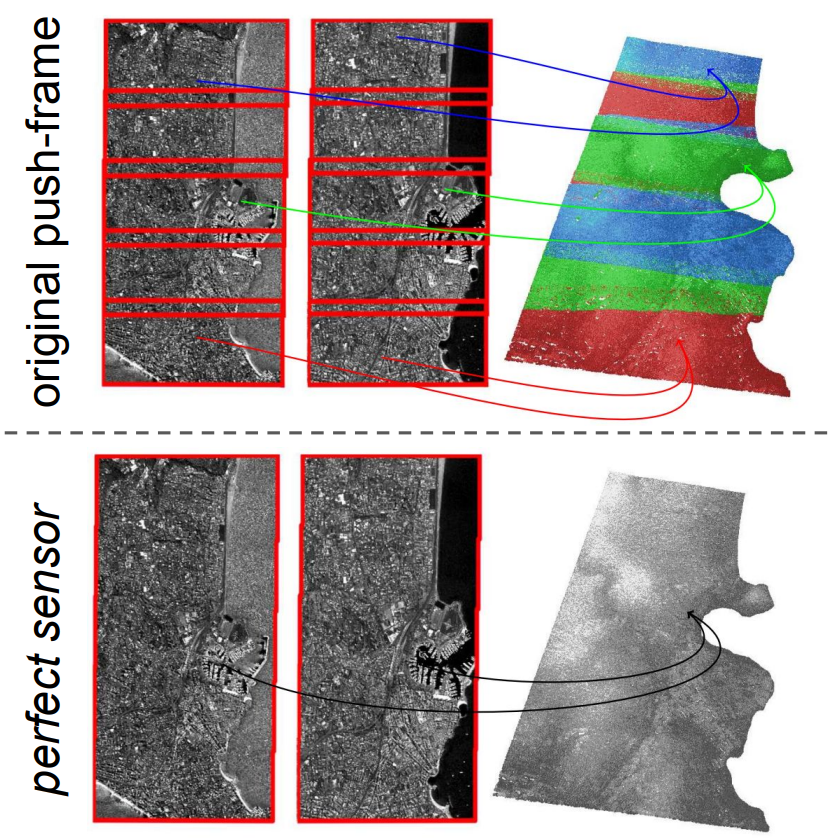
Roger Marí, Thibaud Ehret, Jérémy Anger, Carlo de Franchis, Gabriele Facciolo ISPRS Annals, 2022 paper / poster / doi: 10.5194/isprs-annals-V-1-2022-137-2022 We emulate a perfect sensor to generate a single image from a fragmented push-frame strip. The resulting product simplifies large-scale 3D modeling from push-frame imagery. |
|
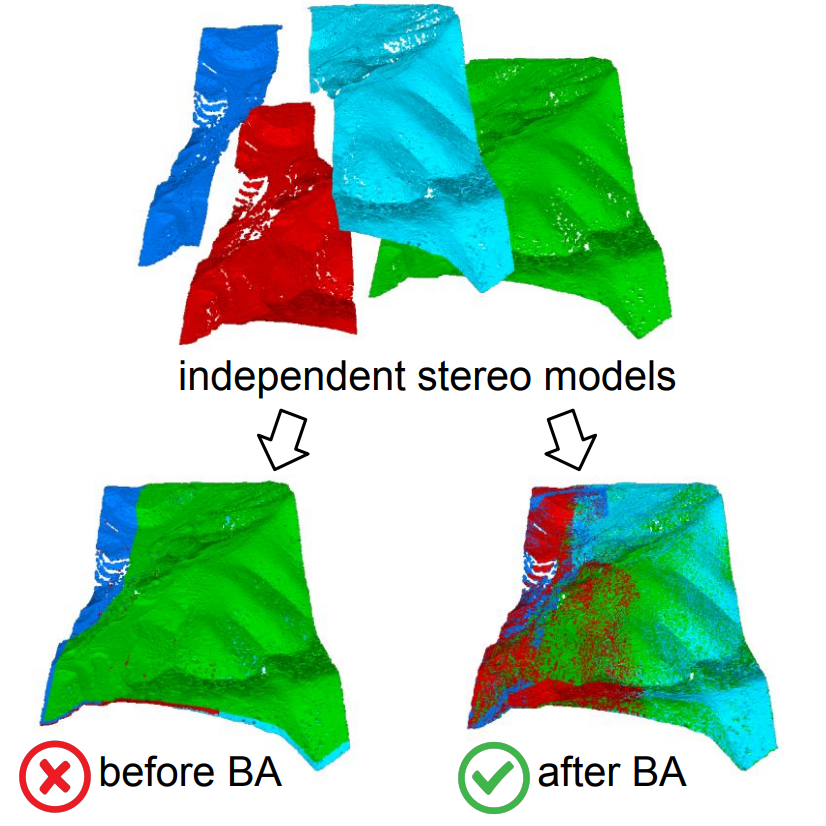
Roger Marí, Carlo de Franchis, Enric Meinhardt-Llopis, Jérémy Anger, Gabriele Facciolo IPOL, 2021 paper / demo / code / doi: 10.5201/ipol.2021.352 We propose a generic bundle adjustment method for multi-view stereo pipelines for satellite images. The RPC camera models of the input views are refined with a rotation that compensates localization errors related to the attitude angles encoding the satellite orientation. |
|
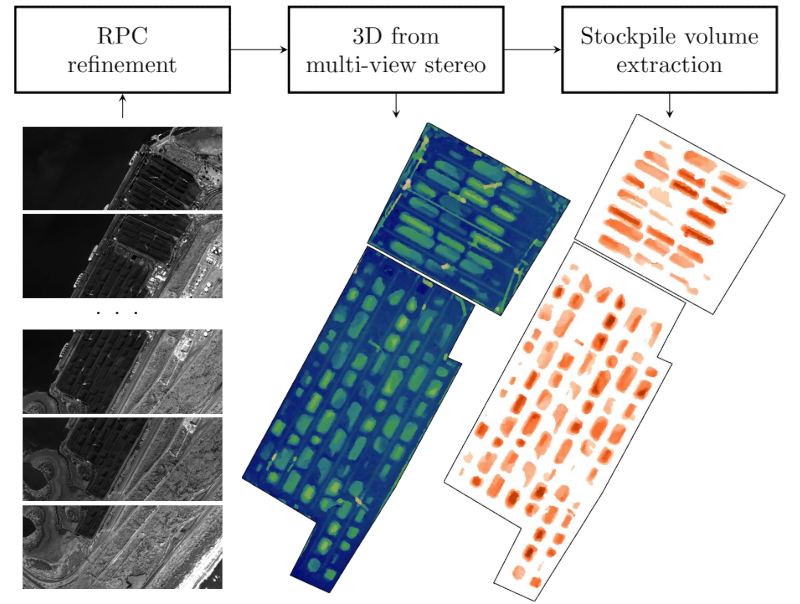
Roger Marí, Carlo de Franchis, Enric Meinhardt-Llopis, Gabriele Facciolo IGARSS, 2021 paper / doi: 10.1109/IGARSS47720.2021.9554482 The RPC camera models of a time series of SkySat acquisitions are refined and used to compute a surface model for each date, which is used to measure the stockpile volume. |
|
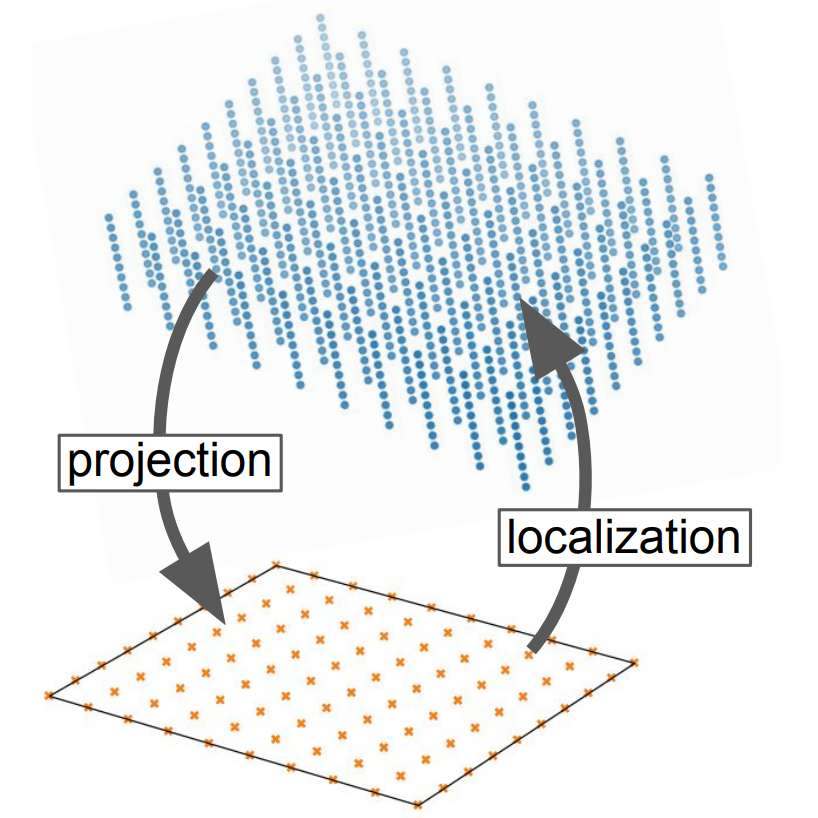
Roland Akiki, Roger Marí, Carlo de Franchis, Jean-Michel Morel, Gabriele Facciolo IGARSS, 2021 paper / code / doi: 10.1109/IGARSS47720.2021.9554583 We describe a terrain-independent algorithm to accurately derive the RPC camera model linking a set of 3D-2D point correspondences based on a regularized least squares fit. |
|
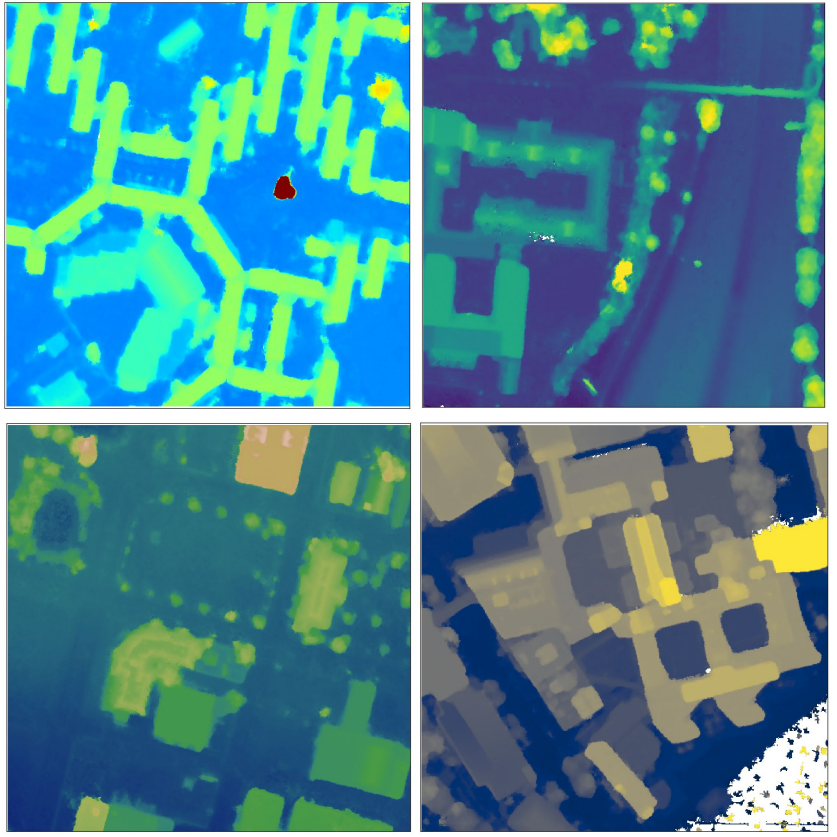
Roger Marí, Carlo de Franchis, Enric Meinhardt-Llopis, Gabriele Facciolo ICCV Workshops, 2019 project page / paper / poster / doi: 10.1109/ICCVW.2019.00274 This work investigates and compares different relative geolocation correction techniques for multi-view stereo pipelines for satellite images. We assess the impact on the output geometry. |
|
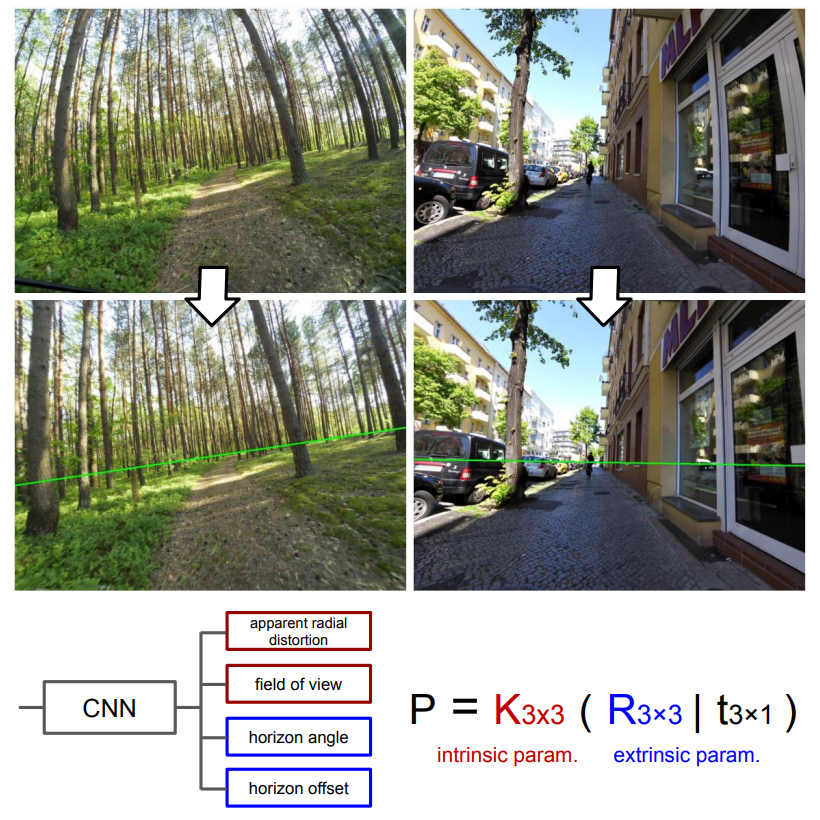
Manuel López-Antequera, Roger Marí, Pau Gargallo, Yubin Kuang, Javier Gonzalez-Jimenez, Gloria Haro CVPR, 2019 paper / supp / doi: 10.1109/CVPR.2019.01209 We present a deep learning method to predict extrinsic (tilt and roll) and intrinsic (focal length and radial distortion) parameters from a single image. We use a parameterization that is better suited for learning than directly predicting the camera parameters. |
|
|